
Minimum cube volume of two grippers performing a knot-tying task

B e, PDF, Supply Chain Management

Learning-based cable coupling effect modeling for robotic manipulation of heavy industrial cables
Adjustable Grip Hitch, How to tie a Adjustable Grip Hitch using Step-by-Step Animations

Minimum cube volume of two grippers performing a knot-tying task
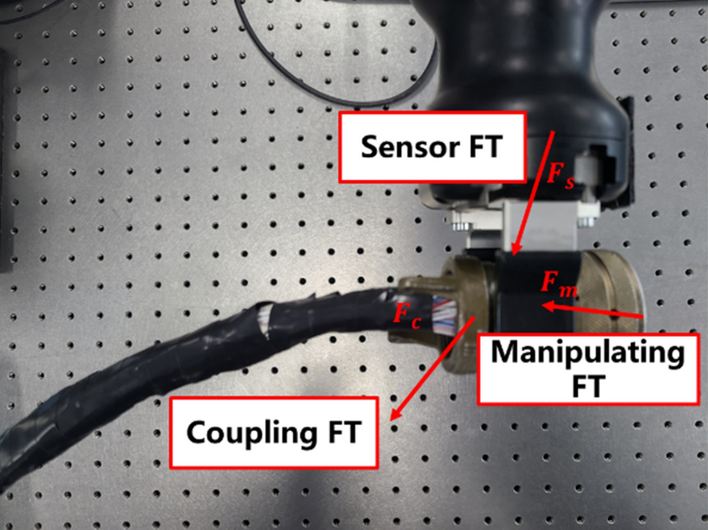
Learning-based cable coupling effect modeling for robotic manipulation of heavy industrial cables

Chapter 2. Prehension

Iterative residual policy: For goal-conditioned dynamic manipulation of deformable objects - Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song, 2023

PDF) Trajectory Optimization of Robotic Suturing

PDF) Trajectory Optimization of Robotic Suturing

Minimum cube volume of two grippers performing a knot-tying task

Generation of synchronized configuration space trajectories with workspace path constraints for an ensemble of robots - Ariyan M Kabir, Shantanu Thakar, Rishi K Malhan, Aniruddha V Shembekar, Brual C Shah, Satyandra K

Der-Lin CHOW, MS, PhD Case Western Reserve University

Iterative residual policy: For goal-conditioned dynamic manipulation of deformable objects - Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song, 2023

Iterative residual policy: For goal-conditioned dynamic manipulation of deformable objects - Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, Shuran Song, 2023

Der-Lin CHOW, MS, PhD Case Western Reserve University









