The Engineer - Nature inspires entangled filaments gripper
Researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have taken inspiration from nature to develop a new robotic gripper.

Robotic gripper made from coffee-filled balloon

A2Z Manufacturing Magazines West Coast Edition for Oct-Nov 2022 by A2Z Manufacturing Magazines - Issuu

Grasping through dynamic weaving with entangled closed loops

Robotic Tentacle Arm: A New Nightmare Unlocked by Harvard - Inside Telecom

A retrofit sensing strategy for soft fluidic robots
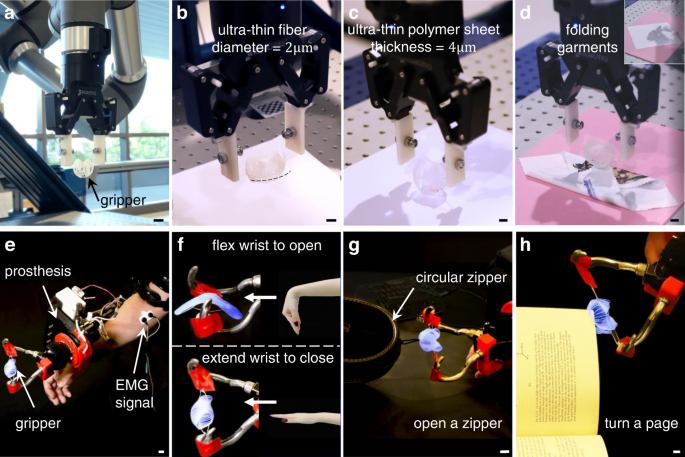
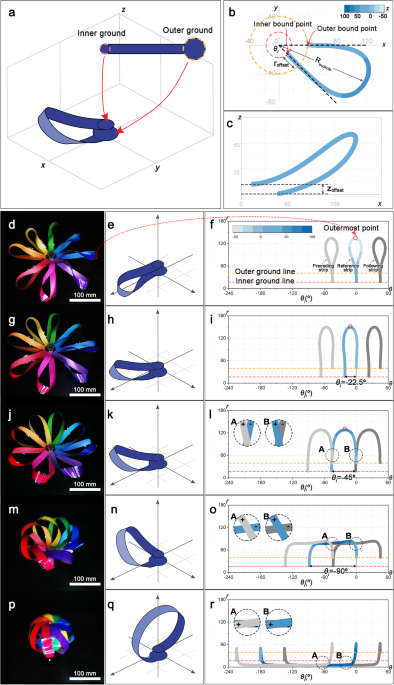
Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision

Bio-inspired 3D-printed lattice structures for energy absorption applications: A review - Doodi Ramakrishna, Gunji Bala Murali, 2023

This Squishy Octopus Robot Snatches Up Fragile Objects with Ease - Nerdist

Active entanglement enables stochastic, topological grasping

Bio‐Inspired Soft Grippers Based on Impactive Gripping - Zhou - 2021 - Advanced Science - Wiley Online Library
Grasping through dynamic weaving with entangled closed loops

Self-spinning filaments for autonomously linked microfibers